ProViz- A Worldclass Robotics and ROS visualizer!
Hey all! Just a quick update on what I’ve been working on over the last couple years. As many of you know, in 2017 while I was still in college I interned at an awesome start-up called Uhnder Inc. in Austin where I learned a great deal about silicon and chip development and assisted and contributed to the efforts of bringing up, characterizing, and shipping the first digital automotive radar!
After college I rejoined Uhnder to help with something a little more “Kshaya”- something a little more inline with my interests! I met an awesome mentor, and a stellar visualization team and we built a world class radar and ROS sensor visualizer called ProViz!
It’s based in React.js, regl, and GM Cruise’s wrapper around WebGL/regl called WorldView. I learned a great deal about WebGL, shaders, JavaScript development, browser environments 3D graphics, and even AWS tooling and hosting!
To know more about my contributions to the project please check out my resume but feel free to check out ProViz! Here is a snippet of some of the cool features I worked on!
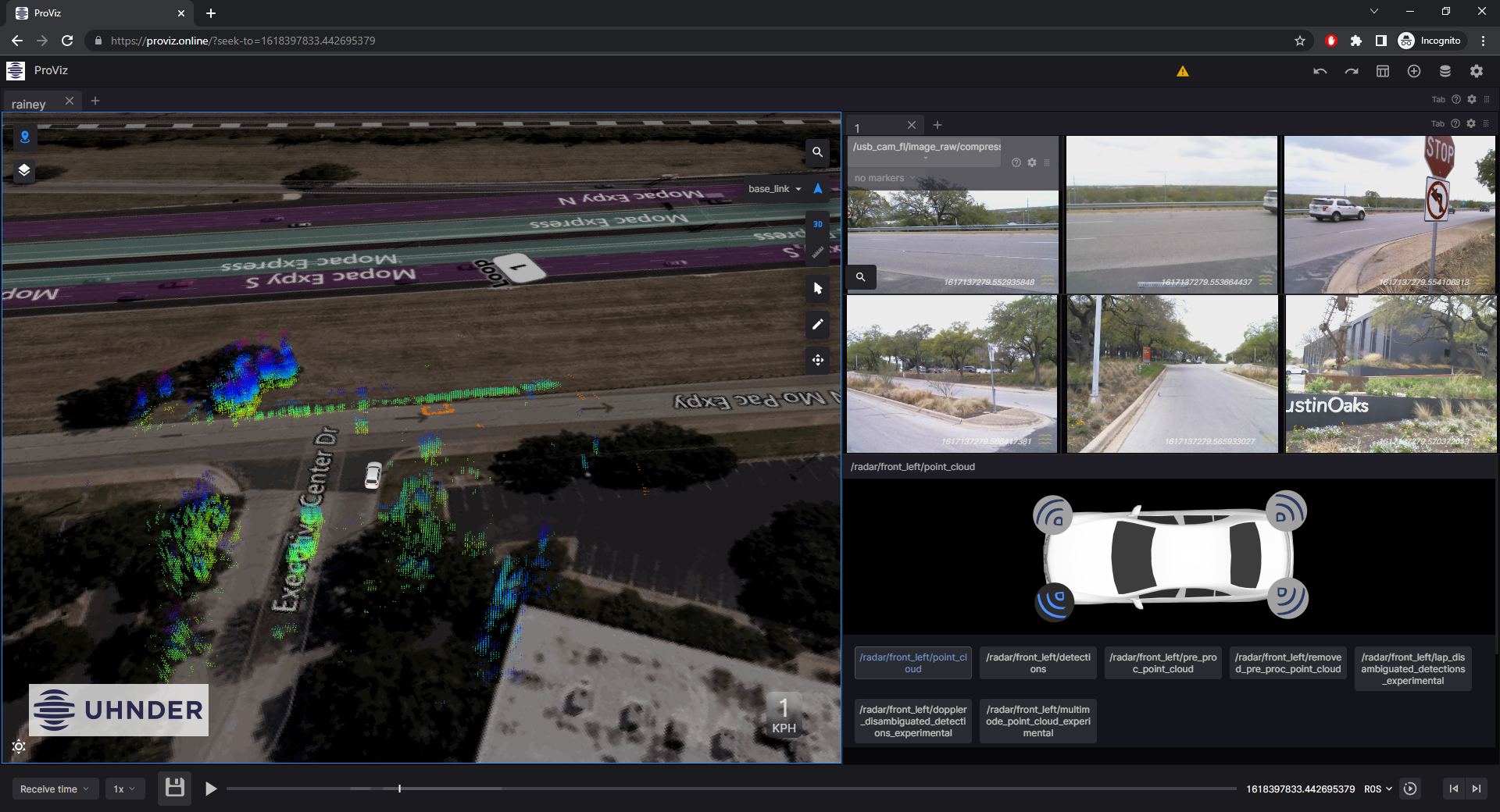
First off, we have on of my first features- a map plane! It uses encoded GNSS data and a mapproxy WMS server to display accurate map data underneath our detections! This allows engineers to make sense of pointclouds and detections by correlating it with the real world!
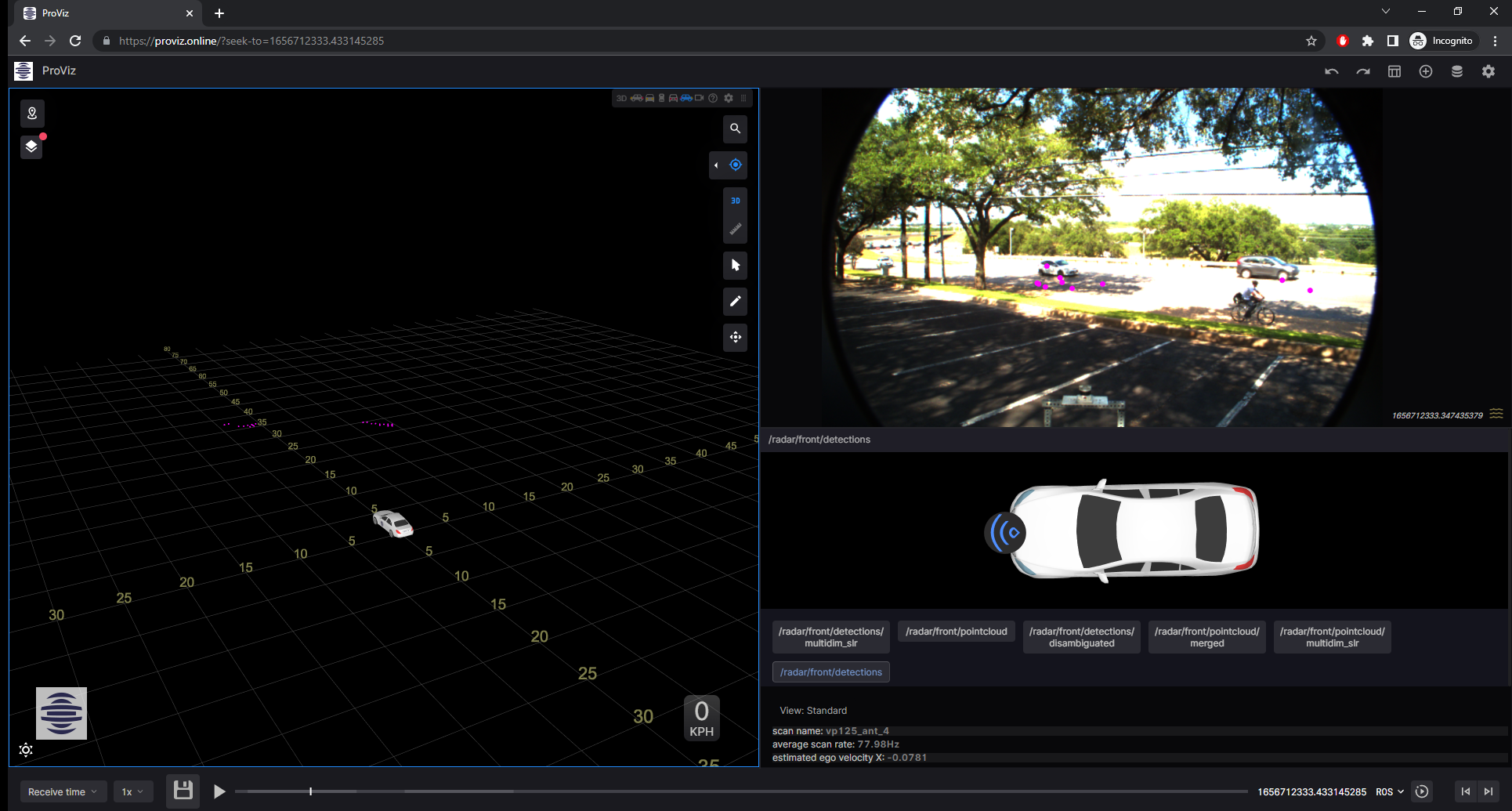
I also developed a camera stream and pointcloud projection feature which allowed the projection of 3D pointcloud data onto a camera stream!
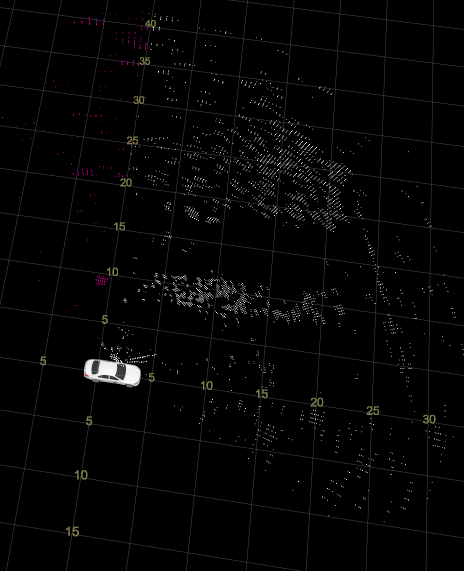
Of course another big portion of analysing pointcloud data is to be able to isolate and filter detections. Here is ProViz filtering points behind the base_link of the car (rear axle per ROS standard)
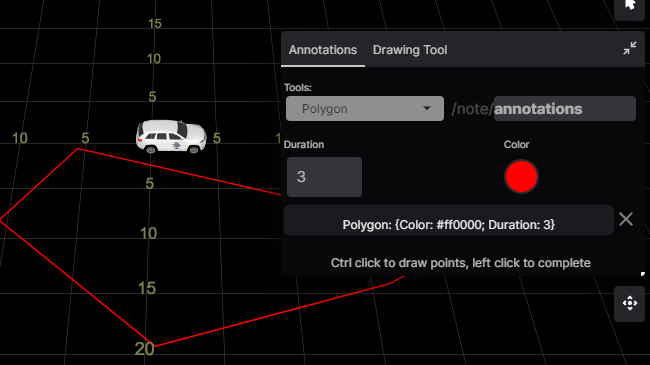
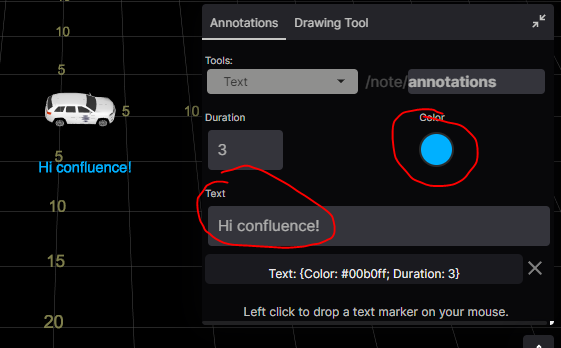
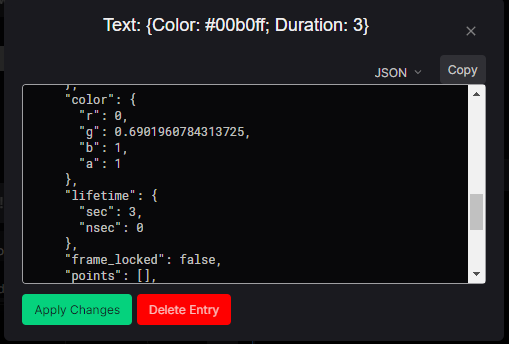
We even made ProViz one of if not THE first web based ROS bag annotation and editing tools! Here is ProViz injecting a VizMarker topic into a ROS Bag to help highlight data and annotate it! ProViz (It’s a PWA so it works offline too!) can even hook-up to a live radar or sensor mounted onto the front of a car and record live RosBridge data!
Of course these are just some of the awesome ProViz features I’ve worked on. In addition to being a core contributor to the project I was also responsible for our CI/CD pipelines in Jenkins, our hosting on AWS (including CDN cacheing, geolocation routing and loadbalancing) and the delivery of ProViz to customers!
I’ve learned so much from this project thanks to an awesome learning environment and great mentors who helped me grow both as an engineer and as a professional!
-Kshaya